圣大学生开发无人驾驶推力换向式飞机模块化平台
{kind=link}
{kind=link}
{kind=link}
“推力换向式飞机模块化平台”项目进入2022年度“Start-up SPbU”大赛决赛。这项研发成果将有助于直接在飞行中根据飞行目的调整航空器 配置,无论其用于地质勘探还是货物运输。学生们计划于近日内展出自动驾驶推理转向式飞机模型,全尺寸原型将于11月前完成。该研发成果将是进口直升机及刚性机翼无人机的最佳替代品。
项目特点
该项目的主要特点之在于——推力换向式飞机被改装为无人驾驶航空器。此外,推力换向式飞机模块化平台可以很容易地将客户定制模块融入到推力换向式飞机系统中,以修改其行为或将模块收集的数据发送到地面。如具备所需模块,飞行器即可就地根据不同任务进行调整。
该模块化平台预计将承载由自动驾驶模块、姿态控制模块、通信模块以及可连接外部用户模块的网关组成的应用程序,这些模块将允许对航空器的功能进行调整以适应用户的具体需求。
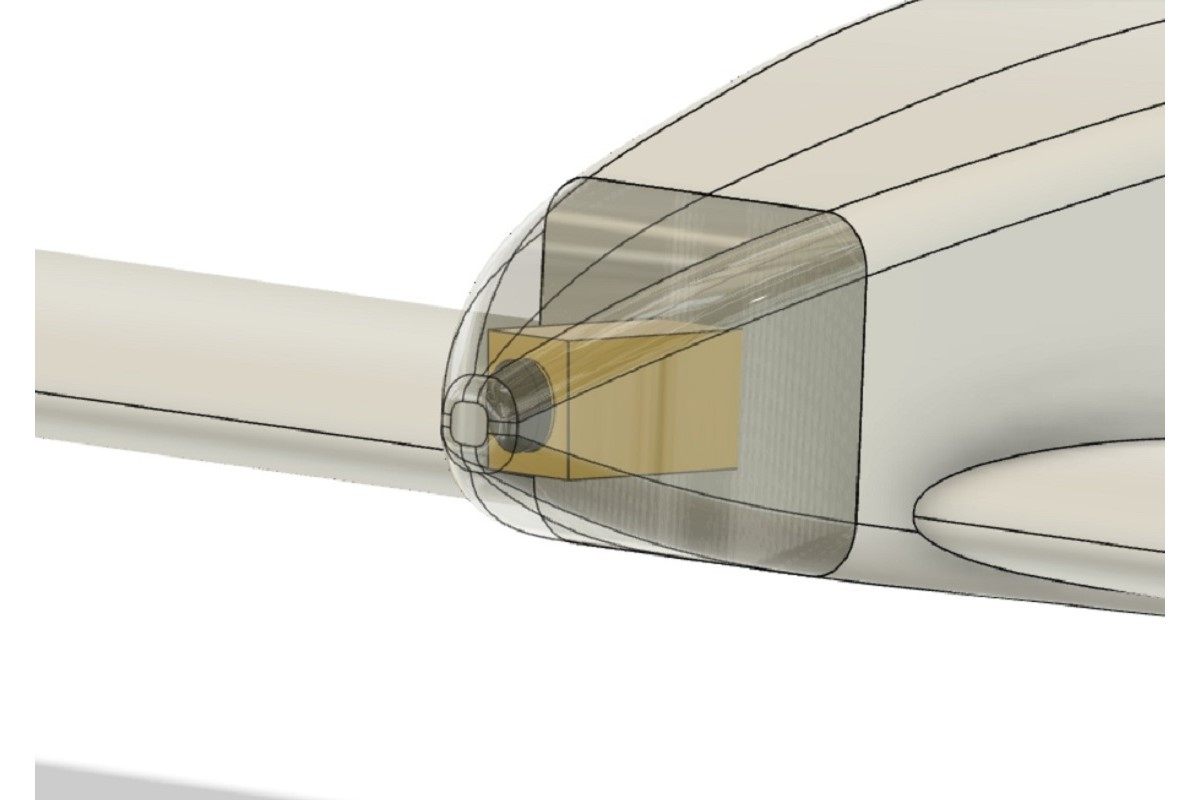
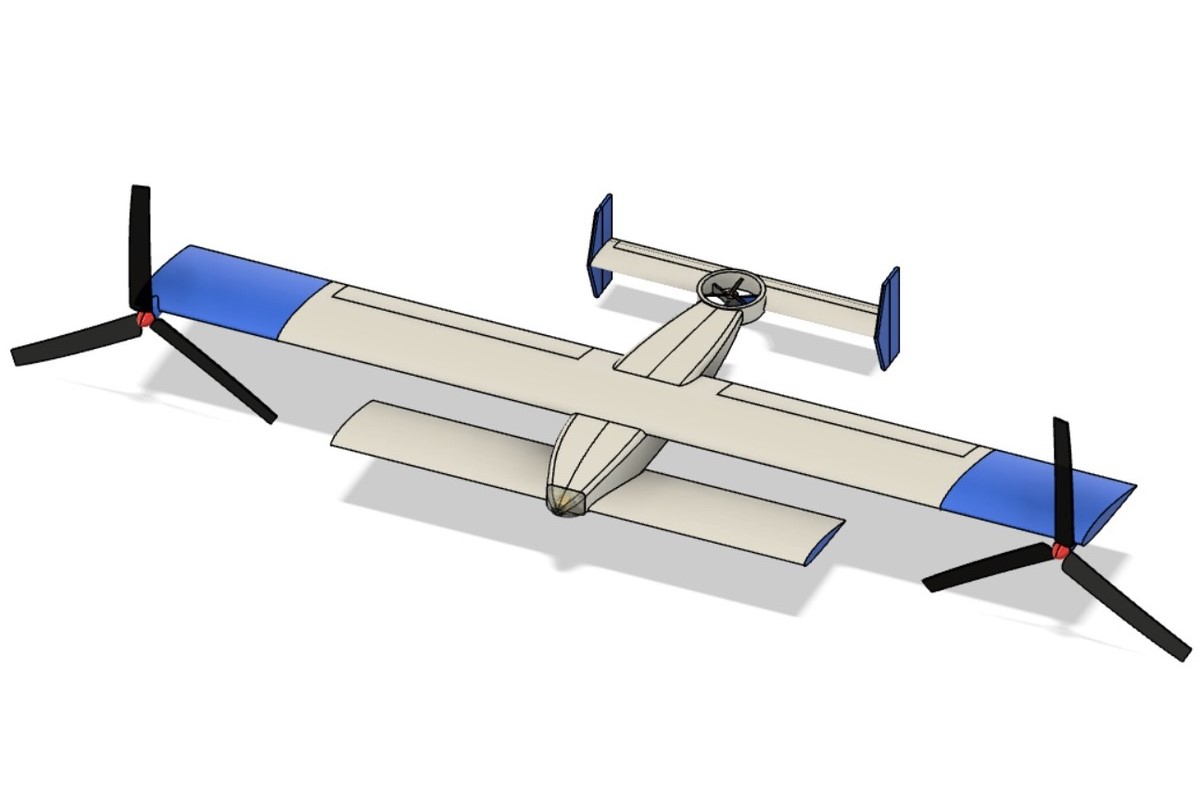
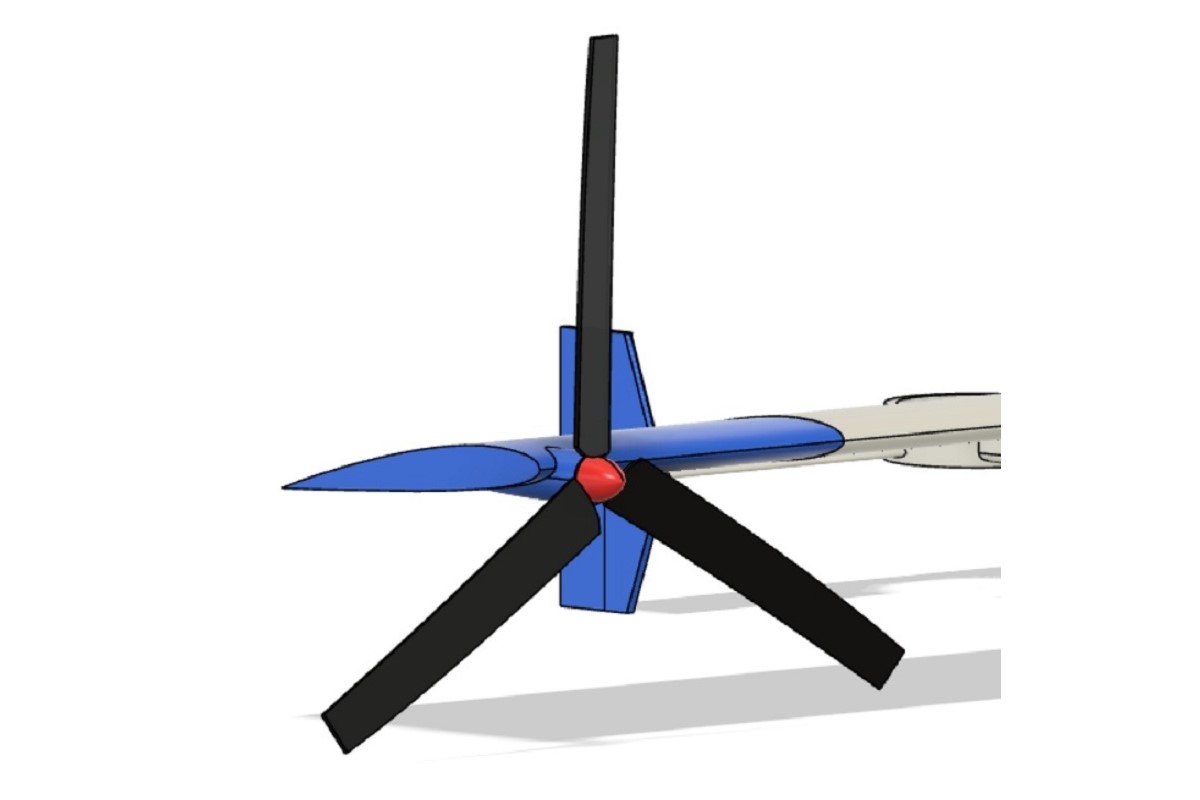
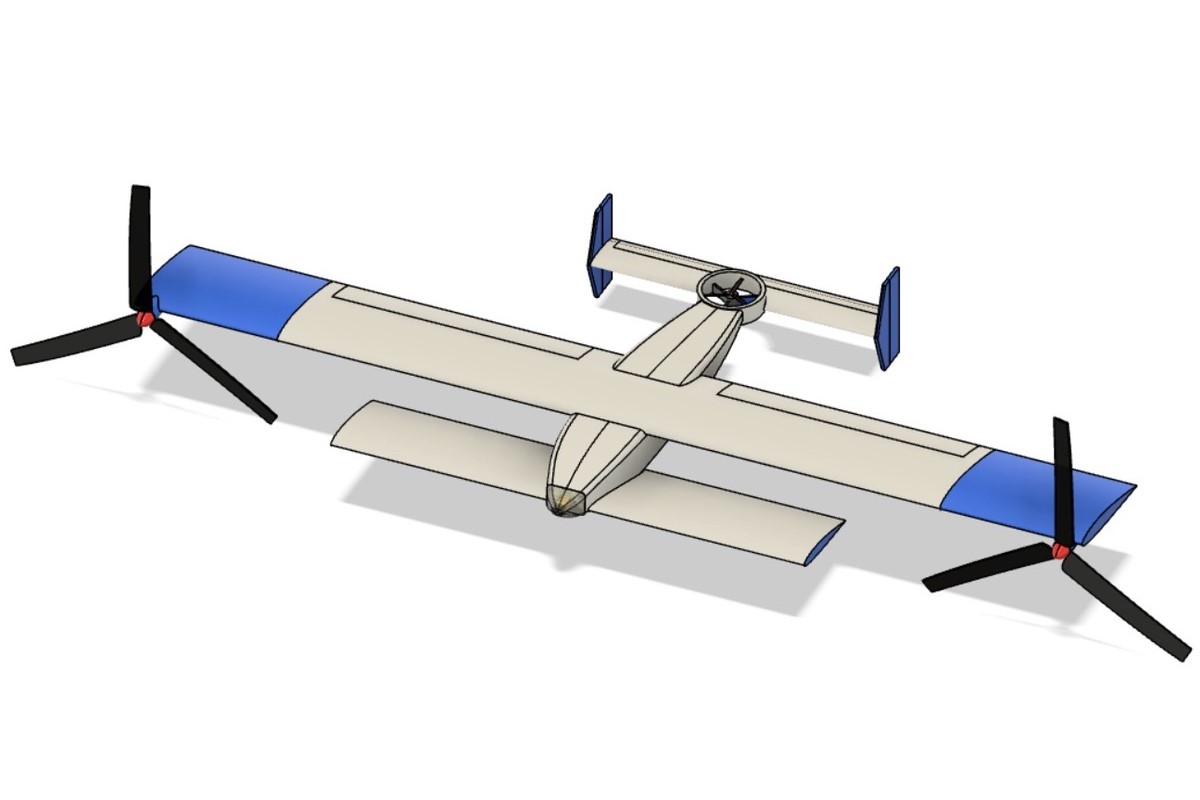
推力换向式飞机是一种基本与定翼机运行原理一致的航空器,但其主翼可以围绕机翼的纵轴旋转。当旋翼处于水平位置时,其呈定翼机飞行状态,处于垂直位置时则呈直升机飞行状态。推力换向式飞机可执行任务范围相当广泛:涵盖空中摄影、应急搜救、应急监测、地理勘探和货物运输。
通常情况下,用户需要完成一系列任务,其中一些任务无法在一次飞行过程中兼具完成。例如,记录磁异常数据(用以证明是否存在矿藏)的磁强计不能与一些产生磁场的仪器放在一起——磁强计读数将产生误差。在这种情况下,需就地直接配置无人机。这正是模块化平台的作用。
项目灵感来源
团队队长、物理系学生弗塞沃洛德·卡布里茨说:”项目最初的想法仅仅是制造一架推力换向式飞机,因为推力换向式飞机本身听起来就很棒了!这个想法实际没有被市场验证过,但具备很好的前景。“
学生经过和地球物理学家的讨论,发现他们缺少的正是这样一台用于山区磁力测量的仪器,因为推力换向式飞机可以适用于复杂的地形,如:有望进行矿产勘探的多山地区,无法建造跑道的森林和沼泽。后来,团队得出结论,即有必要进行模块化处理,以便将来可以扩大客户名单。
客户与供应商
该团队与地球物理调查公司VIRG-Rudgeofizika已签订初步合作协议。团队队长指出:“我们也在努力寻找其他潜在的客户。”学生们还对外国市场和俄罗斯市场进行了分析,几乎找不到价格可接受的相似的解决方案。
自2016年起,我校开始举办” Start-up SPbU“比赛。2022年多支队伍获得圣大捐赠基金的现金奖励,这些队伍提出了最具科技含量及前景的商业模式(两支团队并列”Start-up SPbU“比赛第一——圣彼得堡国立大学),其中第一名奖励35万卢布,第二名25万卢布。
项目开发者预计,目前的政治局势将会影响零部件采购,但正如参赛者指出的那样,事实证明,在俄罗斯有不少与中国合作的经销商,在寻找必要的材料电子产品方面暂时不会面临问题。在未来,该团队打算直接从中国寻找供应源。

该创业团队由4名二年级学生组成。其中两人为程序员:弗塞沃洛德·卡布里茨,兼职队长,专业“物理学”;德米特里·库迪诺夫,专业“面向工程的物理学”。团队中还有两名设计工程师:马特维·伊万诺夫(“面向工程的物理学”)和尼基塔·达维多夫(“化学”)。